La naturaleza competitiva de la industria del petróleo y el gas persevera incluso en tiempos de crisis, como demuestran las continuas peticiones de tecnología más avanzada. Una de las tendencias que observamos en Erdos Miller es que la medición continua de la inclinación está pasando de ser una función deseable para usuarios y casos de uso avanzados a convertirse en un requisito cotidiano.
¿Qué es la medición continua de la inclinación y el acimut?
Una medición continua de inclinación y azimut (a veces denominada inclinación y azimut en rotación) intenta calcular la inclinación de la herramienta de medición durante las operaciones de perforación. Sí, ha leído bien: la herramienta realiza una medición de la inclinación mientras se lleva a cabo la operación de perforación.
Por lo general, el equipo de perforación interrumpe momentáneamente las operaciones y permite que el conjunto del fondo del pozo (BHA) se asiente (deje de vibrar y rotar) para que el instrumento topográfico obtenga una medición de la inclinación libre de interferencias vibratorias. Aunque esto es ideal desde el punto de vista de la calidad de la medición, no proporciona ninguna información sobre el progreso realizado durante la perforación.
He aquí una analogía:
Cuando va conduciendo por la carretera, mantiene los ojos abiertos en todo momento, vigilando continuamente su posición en la carretera y con respecto a la posición de otros coches, y realiza pequeños ajustes a medida que avanza sin interrumpir su progreso. Puedes pensar en la carretera como en tu trayectoria prevista hacia el pozo y en los demás coches como en otros pozos que intentas evitar. Esto es parecido a lo que se puede hacer al perforar con una medición continua de la inclinación y el acimut.
Sin mediciones continuas, tu experiencia de conducción sería algo así:
- Mira dónde estás y hazte una idea de hasta dónde y en qué dirección quieres ir.
- A continuación, cierra los ojos, pisa el acelerador e intenta "sentir" hasta dónde has llegado y en qué dirección.
- Cuando sientas que has ido lo suficientemente lejos y ya no tengas una buena sensación de dónde estás o hacia dónde vas, entonces para el coche, abre los ojos y mira dónde estás.
Es un poco aterrador, ¿verdad? Apuesto a que te costaría mantenerte en la carretera, y probablemente no serías capaz de darte cuenta de que estabas demasiado cerca de otro coche hasta que sintieras el golpe inamistoso de una colisión. Esto es similar a perforar hoy en día sólo con estaciones de sondeo estáticas.
Erdos Miller decidió desarrollar un algoritmo de inclinación y azimut continuos hace aproximadamente un año. Creíamos que sería posible, utilizando algoritmos modernos de estimación de estado, cortar la interferencia vibracional y rotacional del BHA en funcionamiento y obtener una medición. Erdos Miller comenzó a diseñar un algoritmo avanzado que nos permitiría, dentro de un margen de error razonable, calcular la inclinación y el acimut durante la perforación.
Adoptamos un enfoque de tres pasos para entregar un algoritmo comercial:
- Simulación
Inicialmente, Erdos Miller construyó simulaciones digitales de un instrumento de prospección giratorio que experimentaba interferencias vibratorias. Pudimos extraer resultados semirrealistas de los acelerómetros y magnetómetros simulados. Tuvimos cuidado de simular salidas que no fueran ideales, incluyendo tanto interferencias vibratorias como rotacionales, para asegurarnos de que la salida de nuestra simulación fuera lo más realista posible. Estos resultados simulados nos sirvieron de base para diseñar nuestro algoritmo. El algoritmo tenía que ser capaz de realizar mediciones dinámicas, no ideales y con muchas interferencias, y proporcionar rápidamente una medición precisa de la inclinación y el acimut mientras avanzaba la operación de perforación. Una vez realizado el prototipo de mediciones precisas en nuestro modelo simulado, decidimos dar el siguiente paso.
- Pruebas de laboratorio
Erdos Miller implementó el algoritmo prototipo en una de nuestras herramientas MicroPulse. Esto permitió disponer de un buen banco de pruebas con sensores reales para prototipar y evaluar nuestro algoritmo. A continuación, construimos un equipo de pruebas para evaluar nuestra solución. Durante la simulación, resultó muy sencillo simular interferencias simultáneas de vibración y rotación. Sin embargo, en el laboratorio resultó ser un orden de magnitud más complicado. Para simplificar el problema, lo dividimos en dos. Utilizamos una mesa de vibración estándar para simular la interferencia vibracional y, a continuación, construimos un "soporte rotacional" interno que utilizamos para simular la interferencia rotacional. A continuación, montamos el soporte rotacional en un banco de pruebas de balanceo proporcionado por nuestros amigos de Digital Drilling Data Systems (DigiDrill.)
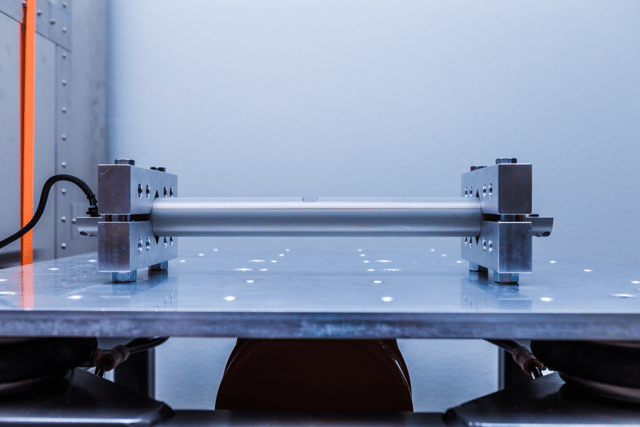
(Perspectiva 1 de la mesa de vibración)
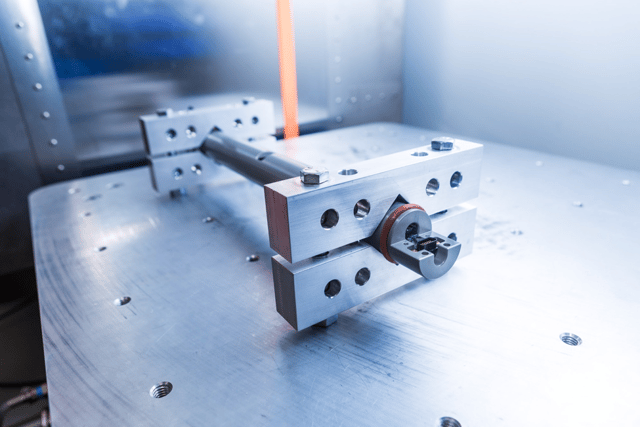
(Perspectiva 2 de la mesa de vibración)
En el banco de vibración probamos el algoritmo en ángulos extremos. 0deg, 5deg, 85deg y 90deg. Esto nos permitió probar el rendimiento del algoritmo bajo vibración en ángulos extremos. Dada la naturaleza mecánica de la mesa de vibración, era difícil realizar pruebas en otros ángulos. Sin embargo, en el banco de rotación pudimos probar el algoritmo en cualquier dirección que quisiéramos y a cualquier régimen de revoluciones. Pudimos probar combinaciones exhaustivas de ángulo y velocidad de rotación hasta que estuvimos satisfechos con el rendimiento del algoritmo.
- Pruebas de campo
El siguiente paso fue introducir nuestras herramientas en un pozo real y comprobar su rendimiento en el mundo real. Incluso después de todo el intenso trabajo de simulación y pruebas de laboratorio, cuando obtuvimos los primeros resultados sobre el terreno nos sentimos un poco decepcionados. Nuestras mediciones no eran excelentes, pero tampoco eran malas; aún nos quedaba trabajo por hacer. Realizamos docenas de pruebas de campo en diferentes secciones del pozo, las verticales, las curvas, las horizontales. Lo que descubrimos es que nuestro algoritmo tenía que ajustarse para funcionar de forma un poco diferente en cada una de estas secciones del pozo. Esto se debió principalmente a la forma en que los campos magnéticos y gravitatorios estaban sesgados en los sensores, así como a las prácticas de perforación ligeramente diferentes en cada sección del pozo. Tuvimos que modificar nuestro algoritmo para que fuera lo suficientemente inteligente como para identificar la sección de perforación y configurarse de forma diferente en función de dónde estuviera operando. Además, aprendimos que existe una lucha constante entre la capacidad de respuesta y la precisión. Cuanto más intentábamos que el algoritmo fuera preciso, menos sensible se volvía, y cuanto más sensible lo hacíamos, menos preciso se volvía. Para resolver este problema, analizamos los índices de penetración habituales y otros comportamientos en diferentes secciones de pozos y ajustamos el algoritmo para obtener la capacidad de respuesta y la precisión adecuadas en cada sección de pozo. Por ejemplo, en la vertical, el algoritmo debe ser más sensible porque a veces se observan velocidades de penetración extremas. En la horizontal, la precisión es fundamental, ya que suele ser la parte del pozo en la que mantener la trayectoria es más rentable a largo plazo. Hemos trabajado duro y, tras varias pruebas, hemos introducido algunas mejoras realmente importantes en el algoritmo.
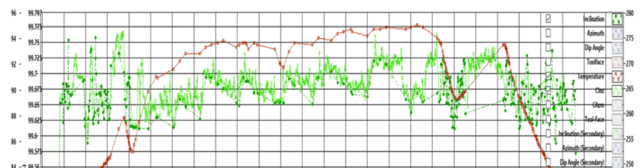
A continuación puede ver algunos de nuestros resultados iniciales de una de nuestras primeras ejecuciones en un lateral de Bakken; la imagen A muestra cómo los resultados fueron menos que ideales. La línea verde oscura muestra las estaciones de prospección estáticas, mientras que la línea verde clara representa las mediciones calculadas de inclinación continua y acimut de nuestro algoritmo. El eje y es el ángulo de inclinación y el eje x es el tiempo.
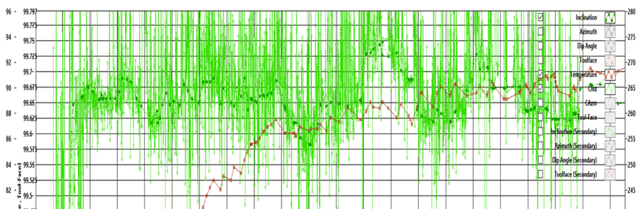
La imagen B, a continuación, muestra los resultados mucho más precisos después de mejorar y ajustar el algoritmo.
Ha sido un largo camino, pero creemos que ha merecido la pena. El algoritmo de inclinación y azimut continuos es un rompecabezas difícil de resolver, pero creemos que estamos proporcionando una gran medición que tiene beneficios en el mundo real para nuestros clientes. Seguiremos perfeccionando nuestras mediciones en el futuro y creemos que algún día no tendremos que parar para realizar ningún levantamiento.
Póngase en contacto con un experto en ingeniería de Erdos Miller hoy mismo para averiguar cómo podemos ayudarle a integrar nuestro algoritmo de inclinación continua en su sistema de medición durante la perforación (MWD).