

Un controlador Proporcional Integral Derivativo (controlador PID) es un sistema de control en lazo cerrado que se utiliza habitualmente en los sistemas de control industrial. Este método es muy eficaz cuando se trata de una aplicación que requiere una modulación de control continua. En el siguiente artículo, resumiremos brevemente la función básica de un controlador PID, la necesidad de sintonizar el lazo de control y el efecto de cada término del controlador.
Conceptos básicos del PID
En esencia, un regulador PID calcula un valor de error definido como la diferencia entre el valor de control actual y un valor de control objetivo. Utilizando este valor de error, el lazo de control proporciona correcciones a algún sistema de salida. Para controlar la naturaleza de las correcciones proporcionadas por el lazo PID, el lazo de control utiliza 3 términos de control. Como su nombre indica, el lazo PID utiliza un término proporcional, integral y derivativo. Cada término influye en los aspectos de cómo el sistema de control se mueve hacia el valor objetivo. Con el fin de ajustar un lazo de control PID para que se comporte de una manera adecuada para ciertas aplicaciones, cada término se multiplica por un coeficiente para modular su influencia en el comportamiento del sistema. En el diagrama siguiente, los 3 coeficientes son Kp, Ki y Kd.
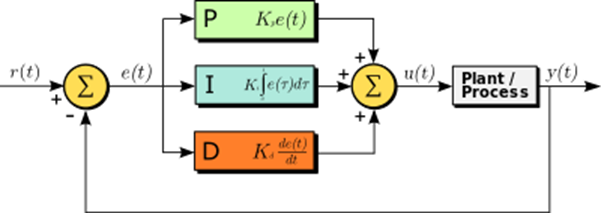
Figura 1: Diagrama de bloques del lazo de control PID
Término proporcional
El término proporcional genera un valor de salida basado en un valor proporcional del valor de error. Aumentar el coeficiente del término proporcional crea un lazo de control más sensible. Con un coeficiente alto, el controlador PID resultante responderá más rápidamente y alcanzará el valor objetivo dado más rápidamente. Sin embargo, este método provocará una mayor inestabilidad del sistema y causará más sobreimpulso. Generalmente, el coeficiente proporcional es el coeficiente dominante de un lazo de control PID y debería contribuir a la mayor parte del comportamiento de salida.
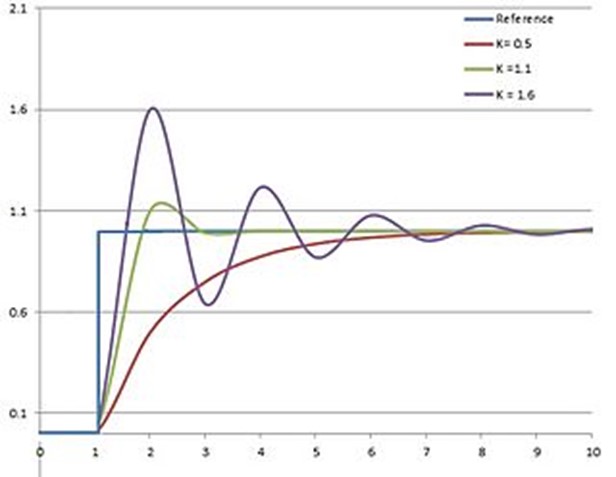
Figura 2: Respuestas del sistema con diferentes coeficientes Kp
Término integral
El error integral toma la integral de los errores registrados por el lazo de control y, por tanto, tiene en cuenta tanto la magnitud como la duración de los valores de error. Dado que la integral tiene en cuenta el tiempo, puede dar cuenta del valor de error actual y de los valores de error detectados en el pasado, algo que el término proporcional por sí solo no puede hacer. Un coeficiente integral más alto ayuda a amortiguar el error de estado estacionario, o la oscilación del valor de salida en torno al valor objetivo. Esto permite que el sistema se estabilice más rápidamente en su objetivo. Sin embargo, los coeficientes integrales altos pueden causar un mayor sobreimpulso al acercarse por primera vez al objetivo.
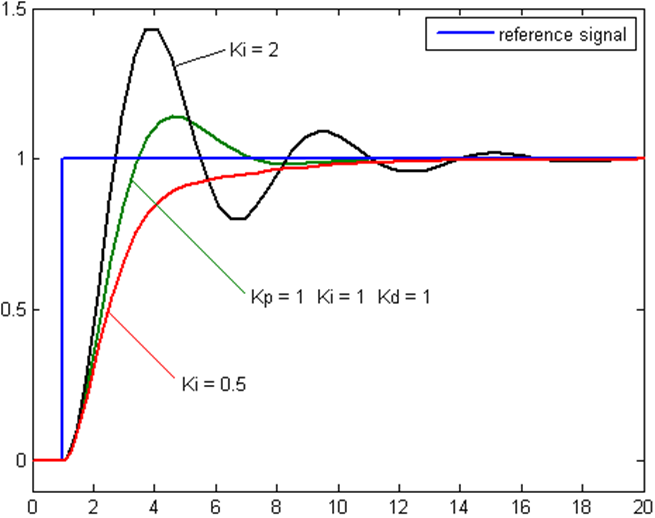
Figura 3: Respuestas del sistema con distintos coeficientes Ki
Término derivativo
El término derivativo utiliza la pendiente del valor de error a medida que cambia con el tiempo. De este modo, el término derivativo rastrea el error a medida que cambia con el tiempo y puede utilizarse para predecir el comportamiento del sistema. El término derivativo puede suavizar en gran medida el rendimiento del lazo de control, aumentar el tiempo de establecimiento y la estabilidad. Sin embargo, el término derivativo de un lazo de control PID rara vez se utiliza en la práctica, ya que sus efectos sobre el rendimiento del sistema pueden ser muy difíciles de predecir. Como resultado, el ajuste de un coeficiente de término derivativo adecuado suele ser muy difícil.
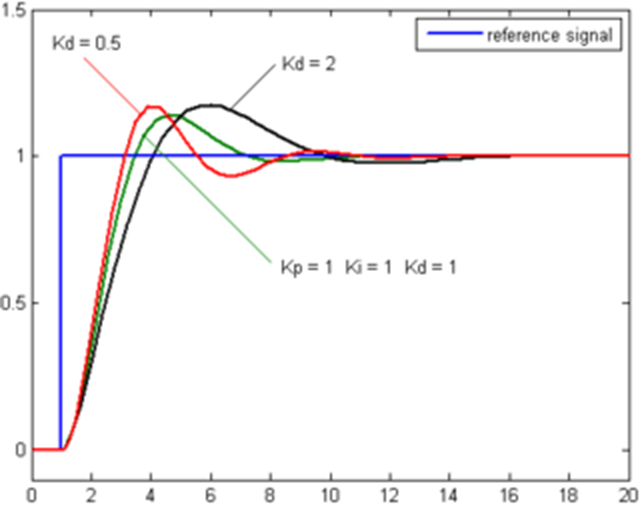
Figura 4: Respuestas del sistema con distintos coeficientes Kd


